标签:计算机控制技术,工厂电气控制技术,http://www.5idzw.com
[组图]直流电机控制电路专辑―6,http://www.5idzw.com
 javascript:resizepic(this) border=undefined>
javascript:resizepic(this) border=undefined>
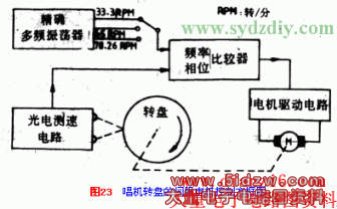
图23是用方块图形式,画出了测速传感器伺服电机系统,能用作唱机转盘精密速度控制的原理图。电机用传统的皮带机构驱动转盘。转盘的边缘,用等间隔反射条文图形结构。用光电测速计进行监视和检测。光电测速计的输出信号正比于转盘的转速。把光电测速计输出信号的相位和频率,与标准振荡器的相位和频率进行比较,用它的误差信号控制电机驱动电路。因此,转盘的转速就精确地保持在额定转速上。额定转速的换档,可由操作开关控制。这些控制电路,已有厂家做成专用的集成电路。
2.数字比例伺服电机
 javascript:resizepic(this) border=undefined>
javascript:resizepic(this) border=undefined>
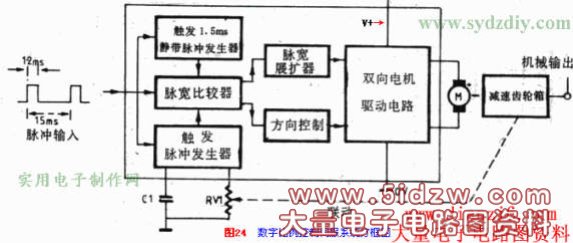
伺服电机的最好类型之一,是用数字比例遥控系统。实际上这些装置是由三部份组成:采用集成电路、伺服电机、减速齿轮盒电位器机构。图24是这种系统的方块图。电路的驱动输入,是用周期为15ms而脉冲宽度为1~2ms的脉冲信号驱动。输入脉冲的宽度,控制伺服机械输出的位置。例如:1ms脉宽,位置在最左边;1.5ms在中是位置,2ms在最右边的位置。
每一个输入脉冲分三路同时传送。一路触发1.5ms脉宽的固定脉冲发生器。一路输入触发脉冲发生器,第三路送入脉宽比较电路。用齿轮盒输出至RV1,控制可变宽度的脉冲发生器。这三种脉冲同时送到脉宽比较器后,一路确定电机驱动电路的方向。另一路送给脉宽扩展器,以控制伺服电机的速度,使得RV1迅速驱动机械位置输出跟随输入脉宽的任何变化。
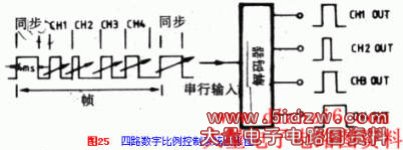
上述伺服电机型常用于多路遥控系统。图25示出了四路数字比例控制系统的波形图。
 javascript:resizepic(this) border=undefined>
javascript:resizepic(this) border=undefined>
从图中可以看出是串行数据输入,经过译码器分出各路的控制信号。每一帧包含4ms的同步脉冲,紧接在后面的是四路可变宽度(1~2ms)顺序的“路”脉冲。译码器将四路脉冲变换为并行形式,就能用于控制伺服电机。
3.数字伺服电机电路
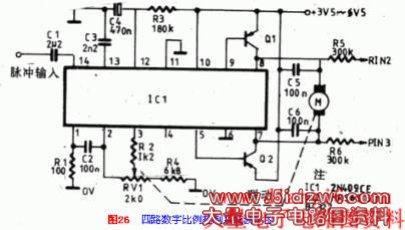
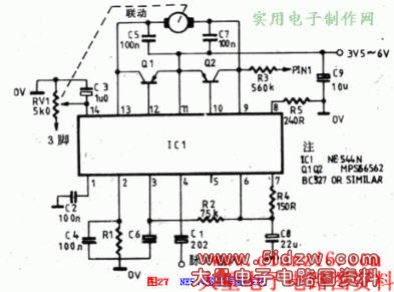
数字伺服电机控制单元,可以买到现成的集成电路。例如ZN409CE或NE544N型伺服电机放大器集成电路。图26和图27示出了这两种集成电路的典型应用。
 javascript:resizepic(this) border=undefined>
javascript:resizepic(this) border=undefined>
 javascript:resizepic(this) border=undefined>
javascript:resizepic(this) border=undefined>
图中元件值适用于输入脉冲宽度为1~2ms,帧脉冲宽度大约为18ms的情况。
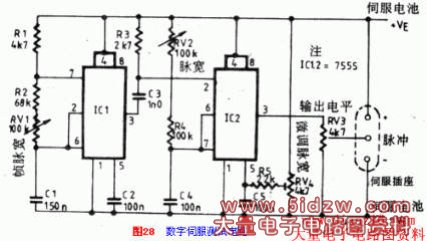
图28是适用上述伺服电机型的通用测试电路。伺服电源电池通常为5V。输入脉冲经标准的伺服插座送到伺服电路。帧脉冲的宽度为13―28ms;用RV1调节控制。RV2调节控制脉冲宽度在1―2ms之间。用RV4微调中间值为1.5ms.输出电平由RV3进行调节。
 javascript:resizepic(this) border=undefined>
javascript:resizepic(this) border=undefined>
伺服电机是一种传统的电机。它是自动装置的执行元件。伺服电机的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小。去掉控制电压后,伺服电机就立即停止转动。伺服电机的应用甚广,几乎所有的自动控制系统都需要用到。在家电产品中,例如录相机、激光唱机等都是不可缺少的重要组成部分。
1.简单伺服电机的工作原理
 javascript:resizepic(this) border=undefined>
javascript:resizepic(this) border=undefined>
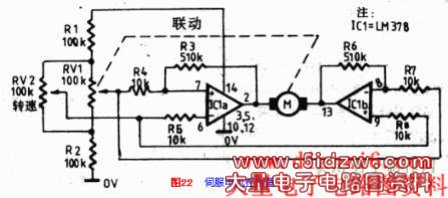
图22示出了伺服电机的最简单的应用。电位器RV1由伺服电机带动。电机可选用电流不超过700mA,电压为12~24V的任一种伺服电机。图中RV1和RV2是接成惠斯登(Wheatstone)电桥。集成电路LM378是双路4瓦功率放大器,也以桥接方式构成电机驱动差分放大器。
当RV2的任意变化,都将破坏电桥的平衡,使RV1―RV2之间产生一差分电压,并且加以放大后送至电机。电机将转动,拖动电位器RV1到新的位置,使电桥重新达到新的平衡。所以说,RV1是跟踪了RV2的运动。
javascript:resizepic(this) border=undefined>图23是用方块图形式,画出了测速传感器伺服电机系统,能用作唱机转盘精密速度控制的原理图。电机用传统的皮带机构驱动转盘。转盘的边缘,用等间隔反射条文图形结构。用光电测速计进行监视和检测。光电测速计的输出信号正比于转盘的转速。把光电测速计输出信号的相位和频率,与标准振荡器的相位和频率进行比较,用它的误差信号控制电机驱动电路。因此,转盘的转速就精确地保持在额定转速上。额定转速的换档,可由操作开关控制。这些控制电路,已有厂家做成专用的集成电路。
2.数字比例伺服电机
javascript:resizepic(this) border=undefined>伺服电机的最好类型之一,是用数字比例遥控系统。实际上这些装置是由三部份组成:采用集成电路、伺服电机、减速齿轮盒电位器机构。图24是这种系统的方块图。电路的驱动输入,是用周期为15ms而脉冲宽度为1~2ms的脉冲信号驱动。输入脉冲的宽度,控制伺服机械输出的位置。例如:1ms脉宽,位置在最左边;1.5ms在中是位置,2ms在最右边的位置。
每一个输入脉冲分三路同时传送。一路触发1.5ms脉宽的固定脉冲发生器。一路输入触发脉冲发生器,第三路送入脉宽比较电路。用齿轮盒输出至RV1,控制可变宽度的脉冲发生器。这三种脉冲同时送到脉宽比较器后,一路确定电机驱动电路的方向。另一路送给脉宽扩展器,以控制伺服电机的速度,使得RV1迅速驱动机械位置输出跟随输入脉宽的任何变化。
上述伺服电机型常用于多路遥控系统。图25示出了四路数字比例控制系统的波形图。
javascript:resizepic(this) border=undefined>从图中可以看出是串行数据输入,经过译码器分出各路的控制信号。每一帧包含4ms的同步脉冲,紧接在后面的是四路可变宽度(1~2ms)顺序的“路”脉冲。译码器将四路脉冲变换为并行形式,就能用于控制伺服电机。
3.数字伺服电机电路
数字伺服电机控制单元,可以买到现成的集成电路。例如ZN409CE或NE544N型伺服电机放大器集成电路。图26和图27示出了这两种集成电路的典型应用。
javascript:resizepic(this) border=undefined>javascript:resizepic(this) border=undefined>图中元件值适用于输入脉冲宽度为1~2ms,帧脉冲宽度大约为18ms的情况。
图28是适用上述伺服电机型的通用测试电路。伺服电源电池通常为5V。输入脉冲经标准的伺服插座送到伺服电路。帧脉冲的宽度为13―28ms;用RV1调节控制。RV2调节控制脉冲宽度在1―2ms之间。用RV4微调中间值为1.5ms.输出电平由RV3进行调节。
javascript:resizepic(this) border=undefined>两个集成电路为时基电路CMOS7555型,电源电压可以低到3V仍然工作。IC1为无稳多谐振荡器,产生帧时间脉冲,它的输出触发IC2。而IC2是一个单稳电路,产生输出测试脉冲。
,[组图]直流电机控制电路专辑―6
上一篇:[组图]电热毯自动保护恒温器
关于《[组图]直流电机控制电路专辑―6》的更多文章
- [组图]直流电机控制电路专辑―6
- › [组图]200米四键遥控模块
- › [组图]高可靠微波感应人体传感器
- › [组图]单端PWM控制器NCP1205及其应用
- › [组图]五例触摸开关电路
- › [组图]触发器的分类
- › [组图]门控开关
- › [组图]巧做妙用声光集成电路10例
- › [组图]荧光灯快速延寿电子起辉器
- › [组图]触摸式延迟开关
- › [组图]实用电话防盗报警器
- › [组图]触摸开关五例
- › [组图]直流电机控制电路专辑―6
- 在百度中搜索相关文章:[组图]直流电机控制电路专辑―6
- 在谷歌中搜索相关文章:[组图]直流电机控制电路专辑―6
- 在soso中搜索相关文章:[组图]直流电机控制电路专辑―6
- 在搜狗中搜索相关文章:[组图]直流电机控制电路专辑―6
- tag: 控制技术,计算机控制技术,工厂电气控制技术,控制技术
相关分类
控制技术 更新
控制技术 推荐排行
- ・ [图文]自制简易遥控开关
- ・ [组图]电热毯自动保护恒温器
- ・ 红外感应灯
- ・ [组图]触摸式延迟开关
- ・ 重复式定时电路
- ・ 选频声控开关
- ・ [组图]巧做妙用声光集成电路10例
- ・ 热释电红外迎送自动识别及问候电路图
- ・ 555简易催眠器
- ・ [组图]精密的单电源光检测电路设计方案
- ・ ps 2键盘编程详细资料
- ・ 节能灯开关电路原理图